A human-robot interaction concept to stop waste leakage at the source. BeachBot (BB) detects small litter and needs your help to detect even more.
Long description
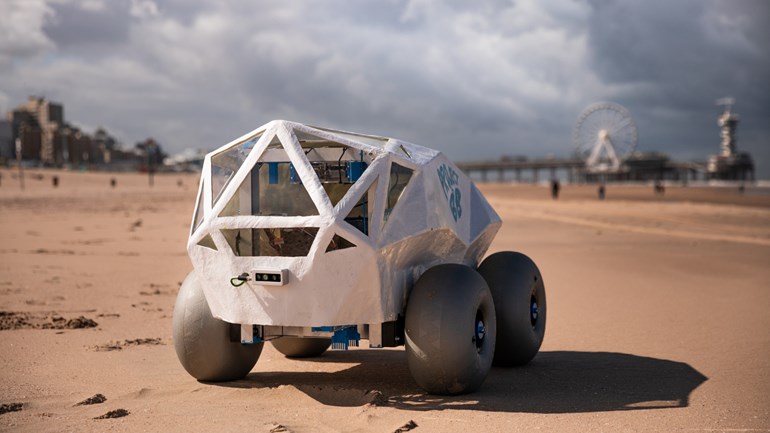
We present a swarm of robots that collaboratively hunt for litter. Originally called BeachBot and MAPP (www.project.bb) they are designed to operate in outdoor areas, like beaches and parks. Our robots are programmed with artificial intelligence which enables them to efficiently map and collect litter, detecting and acting at the same time.
By using our gaming application, anyone with a smartphone can contribute to improve the litter detection algorithm and basically make the robot smarter. The process is simple: the robot scans the area and collects litter images. Each raw image is then added to a database which forms the input for a labeling game where humans can match images with the right type of litter. This way, the initial detection is verified by a reliable (human) source.
A win-win formula since (A) the detection algorithm will be improved enabling the robots to perform their task autonomously over time and (B) increased human awareness on the effects of littering will contribute towards a changing mindset and to stop waste leakage at the source. In a nutshell: a human-robot interaction concept and data management approach to bring true impact to the environment.
Additional Images




Please login or create a profile to view comments